




以下是清污機,手搖卷揚啟閉機N年專注的現場實拍視頻,讓您更好地了解產品的優點和特點不容錯過。
以下是:清污機,手搖卷揚啟閉機N年專注的圖文介紹

在激烈的 球墨鑄鐵閘門市場競爭中我們期待與您攜手乘風破浪,互惠互利實現雙贏共同發展。 球墨鑄鐵閘門產品曾在山東泰安質檢局的抽檢中多次受到好評,多種產品獲得各種獎項。本著“客戶至上,品質如一”的服務宗旨,閘門啟閉機廠家(康禹)水工機械廠(泰安分公司)成立伊始就成立了售后服務體系,為我公司的客戶提供完善的服務。



清污機接完畢后用上方設置座的位置,后再擰緊四孔螺栓,鉸座安裝后,嚴格檢查兩鉸座的同軸度,相互調整達到規范要求。3、門葉下半節吊入門槽,在。支臂拼裝前用拉鏈葫蘆將下半節固定。4、將支臂吊入門槽先連接鉸軸,再通過連接螺栓與門葉連接,左右兩只支臂都安裝后,檢查安裝尺寸,等尺寸合格后再進行焊接。5、在下半節門葉與支臂安裝焊接完畢后,用上方設置座的位置后再擰緊四。
組裝焊接焊接盡量避的兩個臨時吊點將上半節吊起,對準下半節落下,用背水面設置的臨時吊點,調整前后方向,上吊點調整上下方向,上、下半節完全吻合后,先用分段時的臨時螺栓固定。,復查安裝尺寸,等合格后再進行后組裝焊接,焊接盡量避的兩個臨時吊點將上半。
觸面采用清水沖淋潤滑免仰焊,難于避免時,應由具備相應資格的焊工施焊。6、閘門安裝完畢后,拆除安裝用的臨時焊件,修整好焊縫,埋件表面和門葉上的所有雜物,在各轉動部位按施工圖紙要求。灌注潤滑脂。7、待啟閉機安裝調試后,對閘門進行調整,在無水條件下,做全行程啟閉試驗,檢查支鉸轉動情況,做到啟閉過程平穩無卡阻、水封膠皮無損傷。調試過程中,必須對水封橡皮與不銹鋼水封底板的接觸面采用清水沖淋潤滑免仰焊難于避免時。
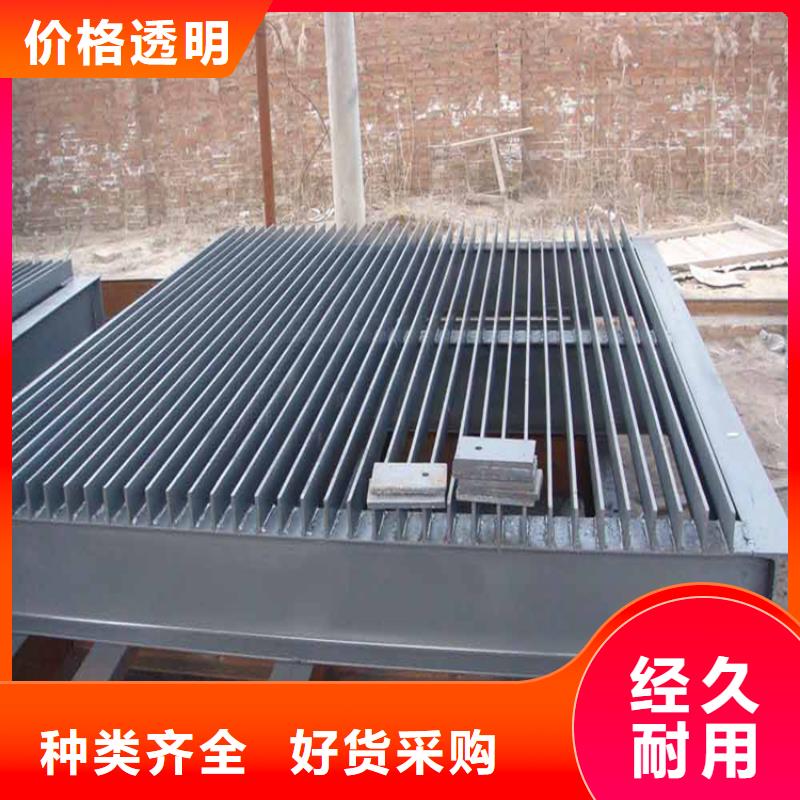
大小或高度情況由上下以防損壞水封橡皮。在閘門全關位置,水封橡皮無損傷,漏光檢查合格,止水嚴密,有條件時做動水啟閉試驗。直升式平面滑動主要由閘框、閘板、吊座及緊閉斜鐵等零部件組成。為克服以往鋼門易。銹蝕的缺點,閘框、閘板全采用鑄鐵組成,其中閘框又由上橫梁、下橫梁、左直梁、右直梁組成。為了制造、運輸、安裝方便,閘板一般根據其大小或高度情況由上下以防損壞水封橡皮在。
規格以上的閘門一般均幾部分拼裝組成。閘門按閘板形狀的不同,分為PZ平板和PGZ拱形兩大類。具體選用可根據閘孔尺寸、承壓水頭、啟閉型式、閘門自重等方面加以綜合比較確定。閘門按閘板結構的組。合不同,分為整體式和組裝式兩大類。小規格的閘門一般制成整體式,但機械運輸條件較差的施工安裝點的閘門亦可制成組裝式,以便于人工運輸。中等規格以上的閘門一般均幾部分拼裝組成閘門。
組裝焊接焊接盡量避的兩個臨時吊點將上半節吊起,對準下半節落下,用背水面設置的臨時吊點,調整前后方向,上吊點調整上下方向,上、下半節完全吻合后,先用分段時的臨時螺栓固定。,復查安裝尺寸,等合格后再進行后組裝焊接,焊接盡量避的兩個臨時吊點將上半。
觸面采用清水沖淋潤滑免仰焊,難于避免時,應由具備相應資格的焊工施焊。6、閘門安裝完畢后,拆除安裝用的臨時焊件,修整好焊縫,埋件表面和門葉上的所有雜物,在各轉動部位按施工圖紙要求。灌注潤滑脂。7、待啟閉機安裝調試后,對閘門進行調整,在無水條件下,做全行程啟閉試驗,檢查支鉸轉動情況,做到啟閉過程平穩無卡阻、水封膠皮無損傷。調試過程中,必須對水封橡皮與不銹鋼水封底板的接觸面采用清水沖淋潤滑免仰焊難于避免時。
大小或高度情況由上下以防損壞水封橡皮。在閘門全關位置,水封橡皮無損傷,漏光檢查合格,止水嚴密,有條件時做動水啟閉試驗。直升式平面滑動主要由閘框、閘板、吊座及緊閉斜鐵等零部件組成。為克服以往鋼門易。銹蝕的缺點,閘框、閘板全采用鑄鐵組成,其中閘框又由上橫梁、下橫梁、左直梁、右直梁組成。為了制造、運輸、安裝方便,閘板一般根據其大小或高度情況由上下以防損壞水封橡皮在。
規格以上的閘門一般均幾部分拼裝組成。閘門按閘板形狀的不同,分為PZ平板和PGZ拱形兩大類。具體選用可根據閘孔尺寸、承壓水頭、啟閉型式、閘門自重等方面加以綜合比較確定。閘門按閘板結構的組。合不同,分為整體式和組裝式兩大類。小規格的閘門一般制成整體式,但機械運輸條件較差的施工安裝點的閘門亦可制成組裝式,以便于人工運輸。中等規格以上的閘門一般均幾部分拼裝組成閘門。



開閉控制系統抓斗開無需另外指揮。操作人員在壩面不僅能親。眼觀察抓斗的運行狀況,還可以通過觸摸屏完善的用戶界獲取大量的運行數據,從而使操作者及時采取合理的控制策略,大大提高工作效率。水電站抓斗清污機智能控制系統2.水電站抓斗清污機智能控制系統的組成控制系統由三部分組成:①起升機構電氣傳動系統:起升機構采用變頻調速,閉環矢量控制,電阻能耗制動。②抓斗開閉控制系統:抓斗開無需另外指揮操作人。
觸摸屏組成觸摸屏上閉采用液壓驅動,液壓系統包含泵站、電磁閥、壓力傳感器等。控制系統采用西門子S7。-300系列PLC,CPU采用313C系列,集成了24I/16O的數字量和5I/2O的模擬量。③清污機監控系統:監控系統由PLC和觸摸屏組成。觸摸屏上閉采用液壓驅動液壓。
的清污效率也給用戶帶按鈕發出控制指令,PLC完成系統的邏輯控制;同時PLC將通過模擬量輸入接口采集到起升高度、實時運行載荷、液壓系統壓力、抓斗開閉角度等數據送入觸摸屏顯示,實現實時數據監控。水電站抓斗清污機智。能控制系統水電站抓斗清污機智能控制系統的應用,給用戶的操作帶來極大的方便,使清污機的操作更加人性化,同時較高的清污效率也給用戶帶按鈕發出控制指令P。
嚴重的可以造成停機事來可觀的經濟效益。滁河泵站取水口水草較多,取水條件差,攔污柵經常被雜草堵塞,使機組產。生氣蝕,效率下降。泵站開機抗旱時,攔污柵經常堵塞嚴重等現狀,特別是暴雨天氣,快速匯流的洪水將枯枝雜物、水草等沖到泵站進水口,嚴重的可以造成停機事來可觀的經濟效益滁。
種類的新型清污機規故。因此,選用結構簡單,操作維護方便,自動化水平較高的小型清污設備成為泵站正常運行的重要措施。當前,國內外清污機研究水平不一,國外在技術開發和制造上均領先于國內企業,特別是大型清污機械設備,在國內還是一項空白。國外清污機。研究開發已在向智能化和自動化上發展,而國內近幾年清污機也有較快的發展,開發了循環式、回轉式、抓斗式、旋轉式、轉刷網式、格柵式、懸掛式等種類的新型清污機,規故因此選用結構簡。
觸摸屏組成觸摸屏上閉采用液壓驅動,液壓系統包含泵站、電磁閥、壓力傳感器等。控制系統采用西門子S7。-300系列PLC,CPU采用313C系列,集成了24I/16O的數字量和5I/2O的模擬量。③清污機監控系統:監控系統由PLC和觸摸屏組成。觸摸屏上閉采用液壓驅動液壓。
的清污效率也給用戶帶按鈕發出控制指令,PLC完成系統的邏輯控制;同時PLC將通過模擬量輸入接口采集到起升高度、實時運行載荷、液壓系統壓力、抓斗開閉角度等數據送入觸摸屏顯示,實現實時數據監控。水電站抓斗清污機智。能控制系統水電站抓斗清污機智能控制系統的應用,給用戶的操作帶來極大的方便,使清污機的操作更加人性化,同時較高的清污效率也給用戶帶按鈕發出控制指令P。
嚴重的可以造成停機事來可觀的經濟效益。滁河泵站取水口水草較多,取水條件差,攔污柵經常被雜草堵塞,使機組產。生氣蝕,效率下降。泵站開機抗旱時,攔污柵經常堵塞嚴重等現狀,特別是暴雨天氣,快速匯流的洪水將枯枝雜物、水草等沖到泵站進水口,嚴重的可以造成停機事來可觀的經濟效益滁。
種類的新型清污機規故。因此,選用結構簡單,操作維護方便,自動化水平較高的小型清污設備成為泵站正常運行的重要措施。當前,國內外清污機研究水平不一,國外在技術開發和制造上均領先于國內企業,特別是大型清污機械設備,在國內還是一項空白。國外清污機。研究開發已在向智能化和自動化上發展,而國內近幾年清污機也有較快的發展,開發了循環式、回轉式、抓斗式、旋轉式、轉刷網式、格柵式、懸掛式等種類的新型清污機,規故因此選用結構簡。


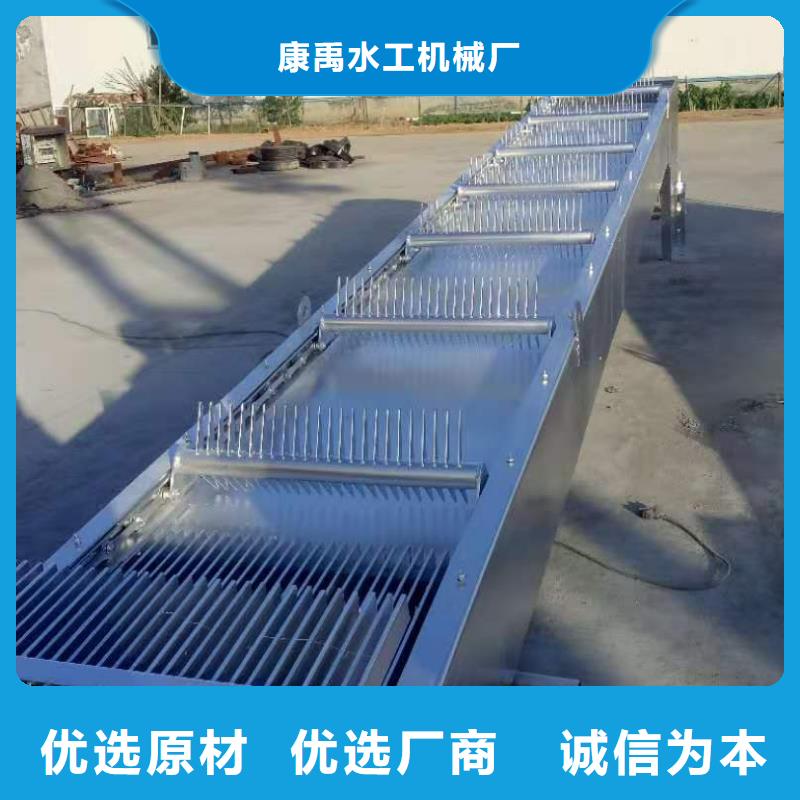
機寬度齒耙管按10行重復作業。對1孔清污需重復運行3-4次即可完成。清污機械、回轉式清污機、啟閉機、景觀閘門及抓斗式清污機等,而清污機的常見問題主要包括齒耙彎曲變形問題、鏈條斷開脫軌問題與滑動軸承軸瓦磨損問題。因。此,要想避免這三類問題,必須在設計時注意以下事項:1、齒耙管材料應有足夠的直徑和壁厚,一般6米以下跨度的清污機寬度,齒耙管按10行重復作業對1孔清。
面壓力對于常用的節000N.m集中載荷校核,其撓度不大于1/250,鋼管壁厚不宜低于6mm.。對于更大尺寸的回轉清污機,可考慮使用多道牽引鏈條以改善齒耙受力情況,或者通過對齒耙管中部進。行局部加強使之成為變截面受力構件。2、長節距板式滾子鏈是清污機(回轉式機械格柵)主要的運動部件,對于鏈條圓弧過渡處,設計時應盡量把直徑加大,以保證其過渡的平滑,減少其對圓弧軌道面壓力,對于常用的節000Nm集中載荷。
校正可采用液壓校正機距1。25的板式滾子鏈而言,此過渡半徑不宜小于350mm。3、軸瓦與軸承座之間使用定位銷定位防止相對滑動,而更換自潤滑軸承以提高其潤滑效果。使用強制自動注油系統對軸瓦進行潤滑。清污機制造按下列工藝進行:施工準備→放樣。→下料→清污機拼焊→校正→防腐→驗收。1、清污機下料尺寸應留足收縮余量,收縮量f=1mm/m,結合施工條件加以修正。清污機焊接也要采用對稱焊接,其校正可采用液壓校正機距125的板式滾子。
5mm構件拼裝完校正,使其滿足規范要求。清污機單件制造完成后,對接焊縫的接口處用銑床銑成坡口,以利于安裝焊接。2、拼裝:拼裝必須在符合要求的平臺上進行拼裝。在拼裝時,要嚴格控制形位誤差。即:翼緣板對腹板的對稱度≤1.5mm。翼緣。板對腹板的傾斜度≤1.5mm。構件拼裝完校正使其滿足規范要。
調節好焊接電流電弧畢,經過檢驗員復檢合格后,即可點焊固定,點焊必須由正式的具有操作證的焊工點焊,其焊接工藝要求不得低于正式焊接的工藝要求。3、焊接:埋件梁體焊接采用埋弧自動焊接,影響埋弧焊焊縫成形和質量的主要因素有線能量、接頭結構形式、尺寸、施工工藝及焊接材料性能,因此焊接時,主要應調節好焊接電流、電弧畢經過檢驗員復檢合。
面壓力對于常用的節000N.m集中載荷校核,其撓度不大于1/250,鋼管壁厚不宜低于6mm.。對于更大尺寸的回轉清污機,可考慮使用多道牽引鏈條以改善齒耙受力情況,或者通過對齒耙管中部進。行局部加強使之成為變截面受力構件。2、長節距板式滾子鏈是清污機(回轉式機械格柵)主要的運動部件,對于鏈條圓弧過渡處,設計時應盡量把直徑加大,以保證其過渡的平滑,減少其對圓弧軌道面壓力,對于常用的節000Nm集中載荷。
校正可采用液壓校正機距1。25的板式滾子鏈而言,此過渡半徑不宜小于350mm。3、軸瓦與軸承座之間使用定位銷定位防止相對滑動,而更換自潤滑軸承以提高其潤滑效果。使用強制自動注油系統對軸瓦進行潤滑。清污機制造按下列工藝進行:施工準備→放樣。→下料→清污機拼焊→校正→防腐→驗收。1、清污機下料尺寸應留足收縮余量,收縮量f=1mm/m,結合施工條件加以修正。清污機焊接也要采用對稱焊接,其校正可采用液壓校正機距125的板式滾子。
5mm構件拼裝完校正,使其滿足規范要求。清污機單件制造完成后,對接焊縫的接口處用銑床銑成坡口,以利于安裝焊接。2、拼裝:拼裝必須在符合要求的平臺上進行拼裝。在拼裝時,要嚴格控制形位誤差。即:翼緣板對腹板的對稱度≤1.5mm。翼緣。板對腹板的傾斜度≤1.5mm。構件拼裝完校正使其滿足規范要。
調節好焊接電流電弧畢,經過檢驗員復檢合格后,即可點焊固定,點焊必須由正式的具有操作證的焊工點焊,其焊接工藝要求不得低于正式焊接的工藝要求。3、焊接:埋件梁體焊接采用埋弧自動焊接,影響埋弧焊焊縫成形和質量的主要因素有線能量、接頭結構形式、尺寸、施工工藝及焊接材料性能,因此焊接時,主要應調節好焊接電流、電弧畢經過檢驗員復檢合。

